Detects bodies of water (of a user-defined minimum size) within an elevation matrix.
detect_water(
heightmap,
zscale = 1,
cutoff = 0.999,
min_area = length(heightmap)/400,
max_height = NULL,
normalvectors = NULL,
keep_groups = FALSE,
progbar = FALSE
)Arguments
- heightmap
A two-dimensional matrix, where each entry in the matrix is the elevation at that point. All grid points are assumed to be evenly spaced. Alternatively, if heightmap is a logical matrix, each entry specifies whether that point is water or not.
- zscale
Default
1. The ratio between the x and y spacing (which are assumed to be equal) and the z axis. For example, if the elevation levels are in units of 1 meter and the grid values are separated by 10 meters,zscalewould be 10.- cutoff
Default
0.999. The lower limit of the z-component of the unit normal vector to be classified as water.- min_area
Default length(heightmap)/400. Minimum area (in units of the height matrix x and y spacing) to be considered a body of water.
- max_height
Default
NULL. If passed, this number will specify the maximum height a point can be considered to be water.- normalvectors
Default
NULL. Pre-computed array of normal vectors from thecalculate_normal()function. Supplying this will speed up water detection.- keep_groups
Default
FALSE. IfTRUE, the matrix returned will retain the numbered grouping information.- progbar
Default
FALSE. IfTRUE, turns on progress bar.
Value
Matrix indicating whether water was detected at that point. 1 indicates water, 0 indicates no water.
Examples
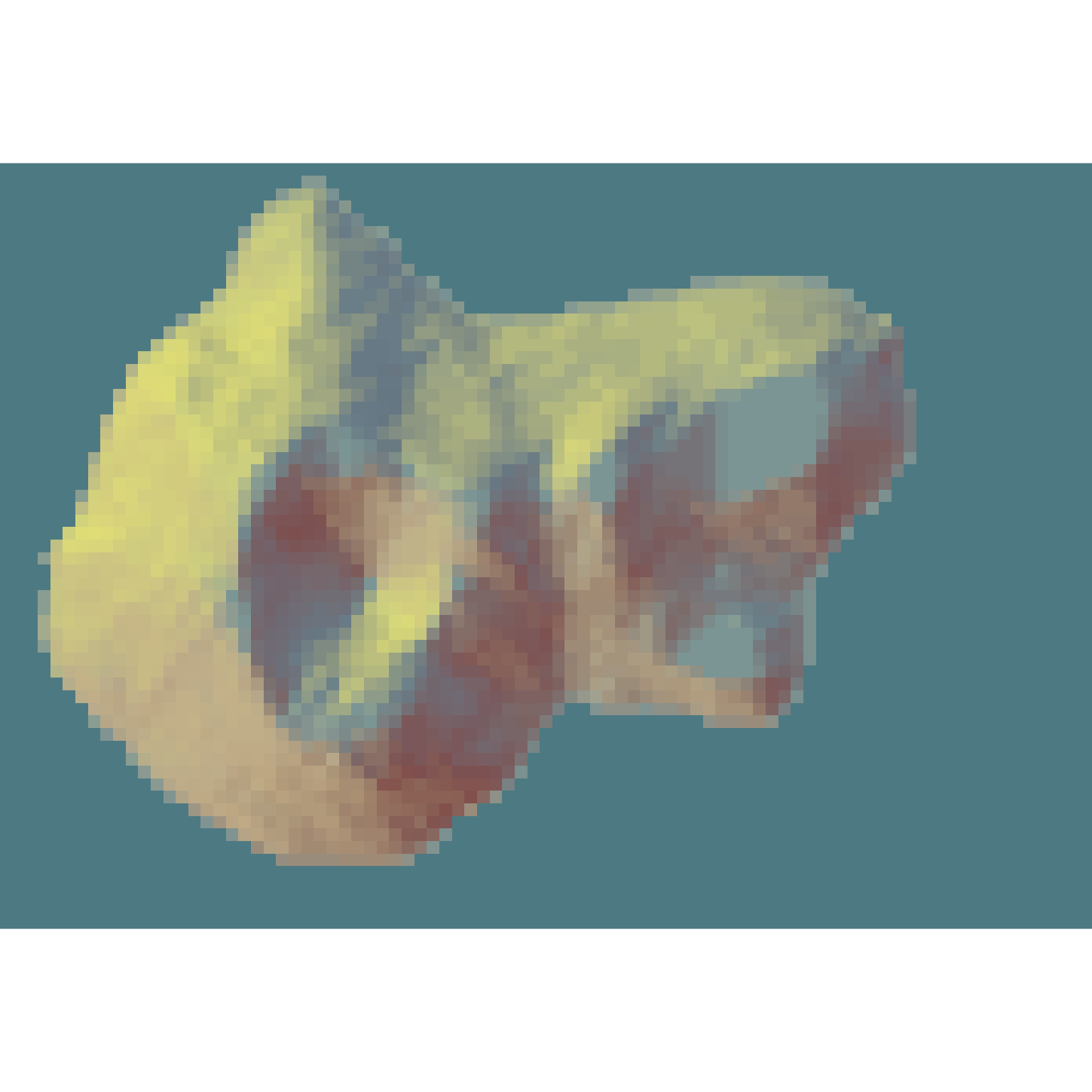
#Here we even out a portion of the volcano dataset to simulate water:
island_volcano = volcano
island_volcano[island_volcano < mean(island_volcano)] = mean(island_volcano)
#Setting a minimum area avoids classifying small flat areas as water:
island_volcano |>
sphere_shade(texture="imhof3") |>
add_water(detect_water(island_volcano, min_area = 400),color="imhof3") |>
plot_map()