Adds a 3D path to the current scene, using latitude/longitude or coordinates in the reference system defined by the extent object. If no altitude is provided, the path will be elevated a constant offset above the heightmap. If the path goes off the edge, the nearest height on the heightmap will be used.
render_path(
lat,
long = NULL,
altitude = NULL,
groups = NULL,
extent = NULL,
zscale = 1,
heightmap = NULL,
resample_evenly = FALSE,
resample_n = 360,
reorder = FALSE,
reorder_first_index = 1,
reorder_duplicate_tolerance = 0.1,
reorder_merge_tolerance = 1,
simplify_tolerance = 0,
linewidth = 0.5,
color = "black",
antialias = FALSE,
offset = 5,
clear_previous = FALSE,
return_coords = FALSE,
tag = "path3d"
)Arguments
- lat
Vector of latitudes (or other coordinate in the same coordinate reference system as extent). Can also be an
sforSpatialLineDataFrameobject.- long
Default
NULL. Vector of longitudes (or other coordinate in the same coordinate reference system as extent). Ignored if lat is ansforSpatialLineDataFrameobject.- altitude
Default
NULL. Elevation of each point, in units of the elevation matrix (scaled by zscale). If leftNULL, this will be just the elevation value at ths surface, offset byoffset. If a single value, all data will be rendered at that altitude.- groups
Default
NULL. Integer vector specifying the grouping of each lat/long path segment, if lat/long are specified as numeric vectors (as opposed tosforSpatialLineDataFrameobjects, where this information is built-in to the object).- extent
Either an object representing the spatial extent of the 3D scene (either from the
raster,terra,sf, orsppackages), a length-4 numeric vector specifyingc("xmin", "xmax","ymin","ymax"), or the spatial object (from the previously aforementioned packages) which will be automatically converted to an extent object.- zscale
Default
1. The ratio between the x and y spacing (which are assumed to be equal) and the z axis in the original heightmap.- heightmap
Default
NULL. Pass this if not including analtitudeargument, or if no extent passed. A two-dimensional matrix, where each entry in the matrix is the elevation at that point. All points are assumed to be evenly spaced.- resample_evenly
Default
FALSE. IfTRUE, this will re-sample the path evenly from beginning to end, which can help vastly reduce the number of points used to draw it (which can improve the performance ofrender_highquality()andrender_snapshot()when usingsoftware_render = TRUE). This function works only ifreorder = TRUE, or if the sf object is already ordered from beginning to end.- resample_n
Default
360. Number of breaks in which to evenly resample the line ifresample_evenly = TRUE.- reorder
Default
FALSE. IfTRUE, this will attempt to re-order the rows within ansfobject with multiple paths to be one continuous, end-to-end path. This happens in two steps: merging duplicate paths that have end points that match with another object (withinreorder_duplicate_tolerancedistance), and then merges them (withinreorder_merge_tolerancedistance) to form a continuous path.- reorder_first_index
Default
1. The index (row) of thesfobject in which to begin the reordering process. This merges and reorders paths withinreorder_merge_tolerancedistance until it cannot merge any more, and then repeats the process in the opposite direction.- reorder_duplicate_tolerance
Default
0.1. Lines that have start and end points (does not matter which) within this tolerance that match a line already processed (order determined byreorder_first_index) will be discarded.- reorder_merge_tolerance
Default
1. Lines that have start points that are within this distance to a previously processed line's end point (order determined byreorder_first_index) will be reordered within thesfobject to form a continuous, end-to-end path.- simplify_tolerance
Default
0(no simplification). If greater than zero, simplifies the path to the tolerance specified. This happens after the data has been merged ifreorder = TRUE. If the input data is specified with long-lat coordinates andsf_use_s2()returnsTRUE, then the value of simplify_tolerance must be specified in meters.- linewidth
Default
3. The line width.- color
Default
black. Color of the line.- antialias
Default
FALSE. IfTRUE, the line with be have anti-aliasing applied. NOTE: anti-aliasing can cause some unpredictable behavior with transparent surfaces.- offset
Default
5. Offset of the track from the surface, ifaltitude = NULL.- clear_previous
Default
FALSE. IfTRUE, it will clear all existing paths.- return_coords
Default
FALSE. IfTRUE, this will return the internal rayshader coordinates of the path, instead of plotting the line.- tag
Default
"path3d". The rgl tag to use when adding the path to the scene.
Examples
if(run_documentation()) {
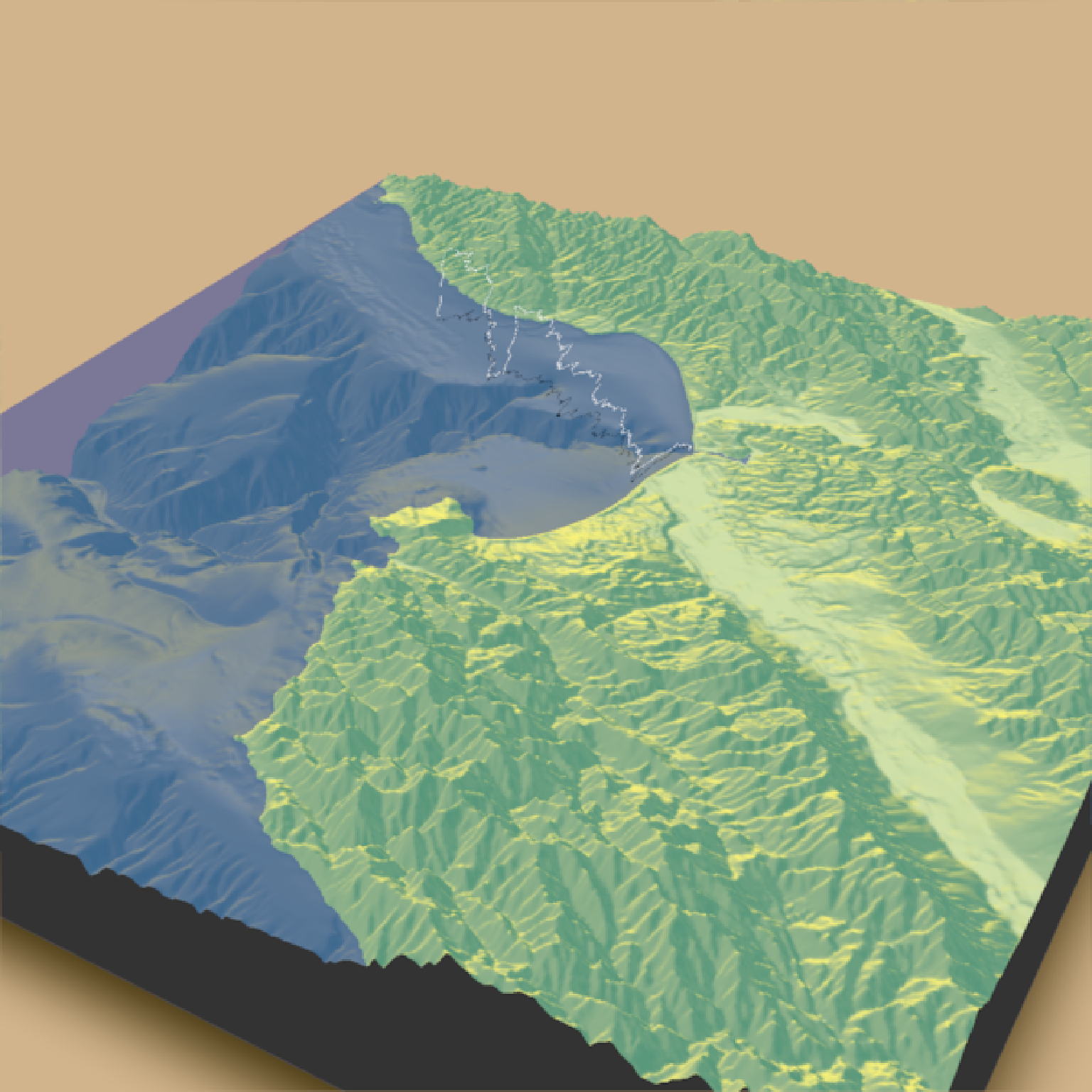
#Starting at Moss Landing in Monterey Bay, we are going to simulate a flight of a bird going
#out to sea and diving for food.
#First, create simulated lat/long data
set.seed(2009)
moss_landing_coord = c(36.806807, -121.793332)
x_vel_out = -0.001 + rnorm(1000)[1:300]/1000
y_vel_out = rnorm(1000)[1:300]/200
z_out = c(seq(0,2000,length.out = 180), seq(2000,0,length.out=10),
seq(0,2000,length.out = 100), seq(2000,0,length.out=10))
bird_track_lat = list()
bird_track_long = list()
bird_track_lat[[1]] = moss_landing_coord[1]
bird_track_long[[1]] = moss_landing_coord[2]
for(i in 2:300) {
bird_track_lat[[i]] = bird_track_lat[[i-1]] + y_vel_out[i]
bird_track_long[[i]] = bird_track_long[[i-1]] + x_vel_out[i]
}
#Render the 3D map
montereybay |>
sphere_shade() |>
plot_3d(montereybay,zscale=50,water=TRUE,
shadowcolor="#40310a", watercolor="#233aa1", background = "tan",
theta=210, phi=22, zoom=0.20, fov=55)
#Pass in the extent of the underlying raster (stored in an attribute for the montereybay
#dataset) and the latitudes, longitudes, and altitudes of the track.
render_path(extent = attr(montereybay,"extent"),
lat = unlist(bird_track_lat), long = unlist(bird_track_long),
altitude = z_out, zscale=50,color="white", antialias=TRUE)
render_snapshot()
}
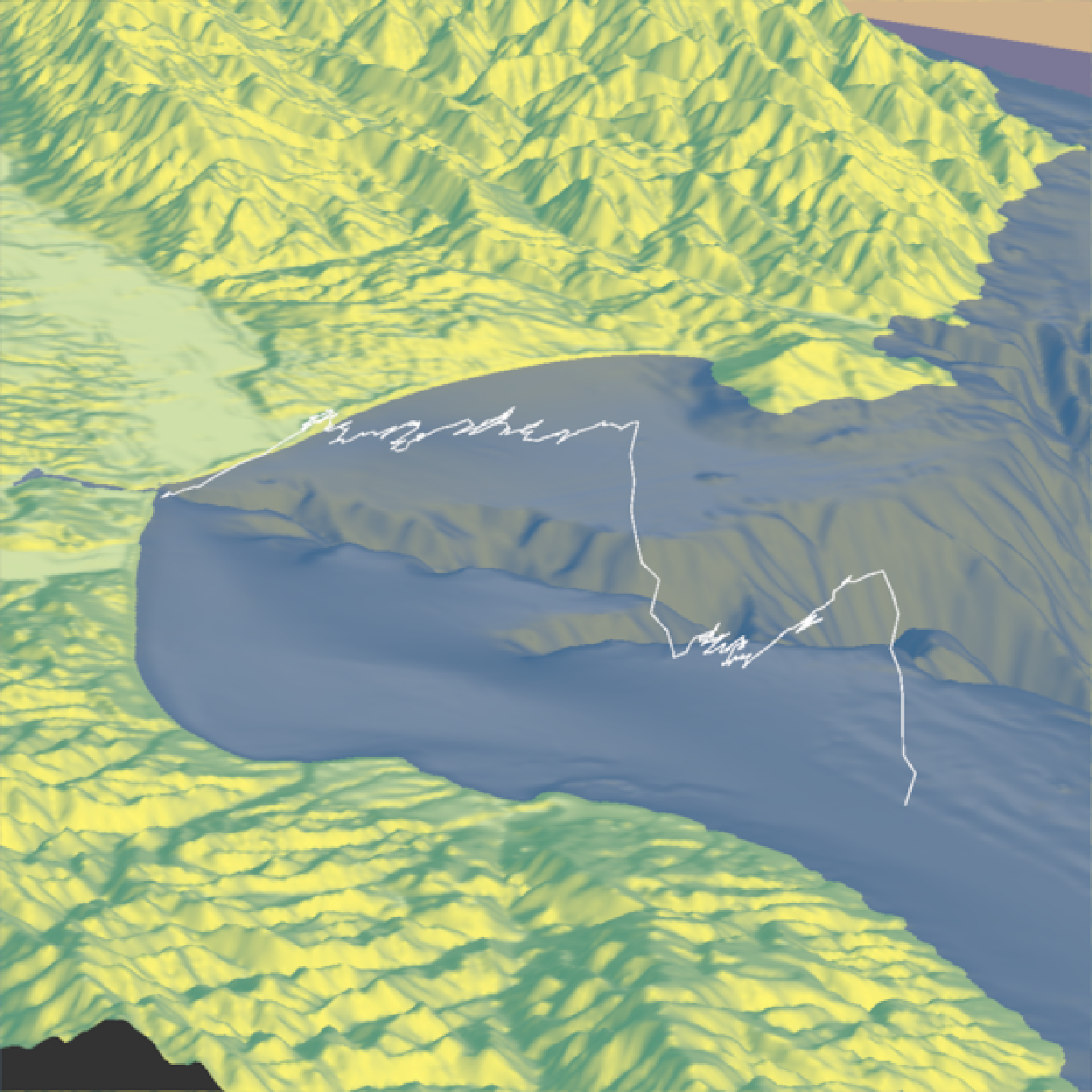 if(run_documentation()) {
#We'll set the altitude to right above the water to give the tracks a "shadow".
render_path(extent = attr(montereybay,"extent"),
lat = unlist(bird_track_lat), long = unlist(bird_track_long),
altitude = 10, zscale=50, color="black", antialias=TRUE)
render_camera(theta=30,phi=35,zoom=0.45,fov=70)
render_snapshot()
}
if(run_documentation()) {
#We'll set the altitude to right above the water to give the tracks a "shadow".
render_path(extent = attr(montereybay,"extent"),
lat = unlist(bird_track_lat), long = unlist(bird_track_long),
altitude = 10, zscale=50, color="black", antialias=TRUE)
render_camera(theta=30,phi=35,zoom=0.45,fov=70)
render_snapshot()
}
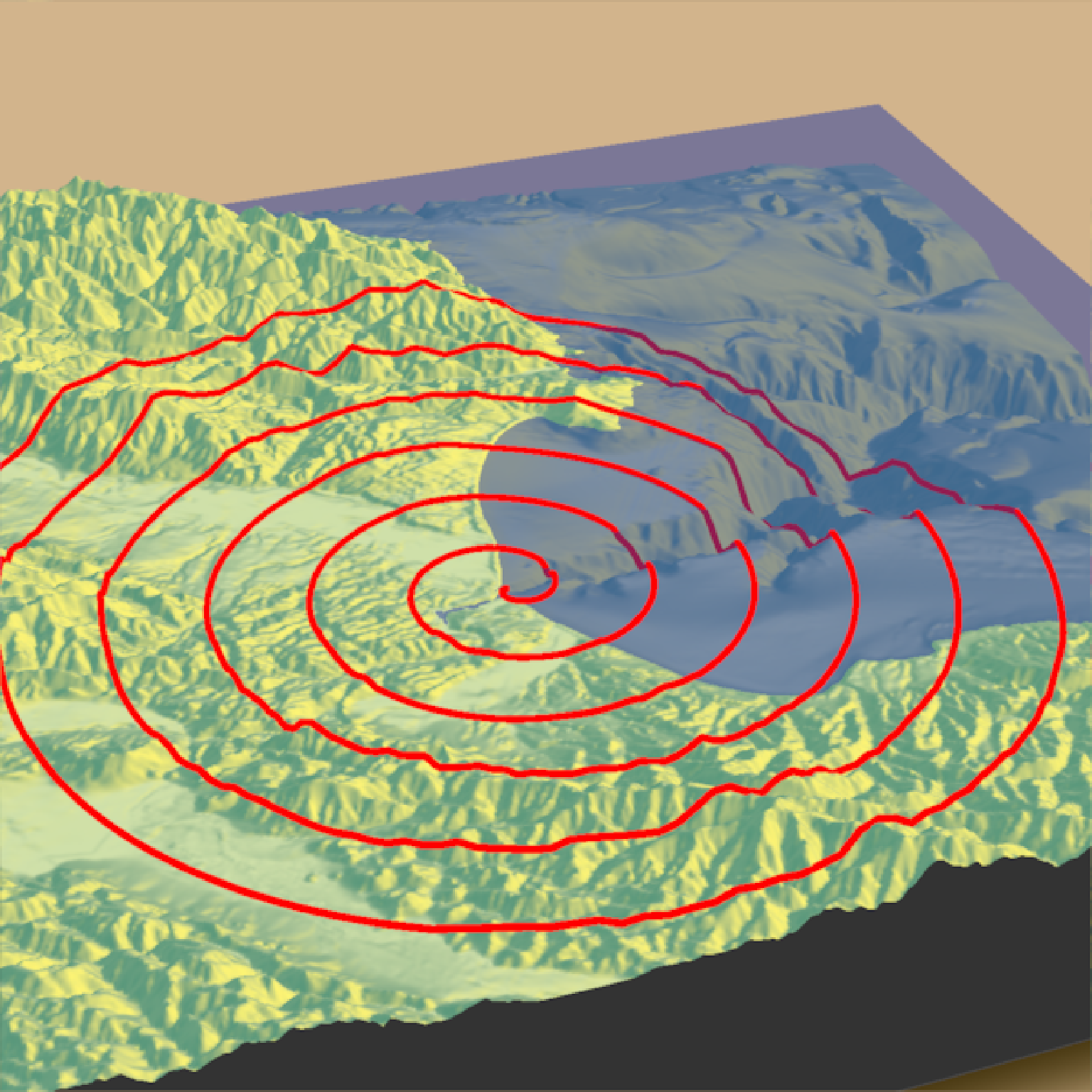
 if(run_documentation()) {
#Remove the path:
render_path(clear_previous=TRUE)
#Finally, we can also plot just GPS coordinates offset from the surface by leaving altitude `NULL`
# Here we plot a spiral of values surrounding Moss Landing. This requires the original heightmap.
t = seq(0,2*pi,length.out=1000)
circle_coords_lat = moss_landing_coord[1] + 0.5 * t/8 * sin(t*6)
circle_coords_long = moss_landing_coord[2] + 0.5 * t/8 * cos(t*6)
render_path(extent = attr(montereybay,"extent"), heightmap = montereybay,
lat = unlist(circle_coords_lat), long = unlist(circle_coords_long),
zscale=50, color="red", antialias=TRUE,offset=100, linewidth=5)
render_camera(theta = 160, phi=33, zoom=0.4, fov=55)
render_snapshot()
}
if(run_documentation()) {
#Remove the path:
render_path(clear_previous=TRUE)
#Finally, we can also plot just GPS coordinates offset from the surface by leaving altitude `NULL`
# Here we plot a spiral of values surrounding Moss Landing. This requires the original heightmap.
t = seq(0,2*pi,length.out=1000)
circle_coords_lat = moss_landing_coord[1] + 0.5 * t/8 * sin(t*6)
circle_coords_long = moss_landing_coord[2] + 0.5 * t/8 * cos(t*6)
render_path(extent = attr(montereybay,"extent"), heightmap = montereybay,
lat = unlist(circle_coords_lat), long = unlist(circle_coords_long),
zscale=50, color="red", antialias=TRUE,offset=100, linewidth=5)
render_camera(theta = 160, phi=33, zoom=0.4, fov=55)
render_snapshot()
}
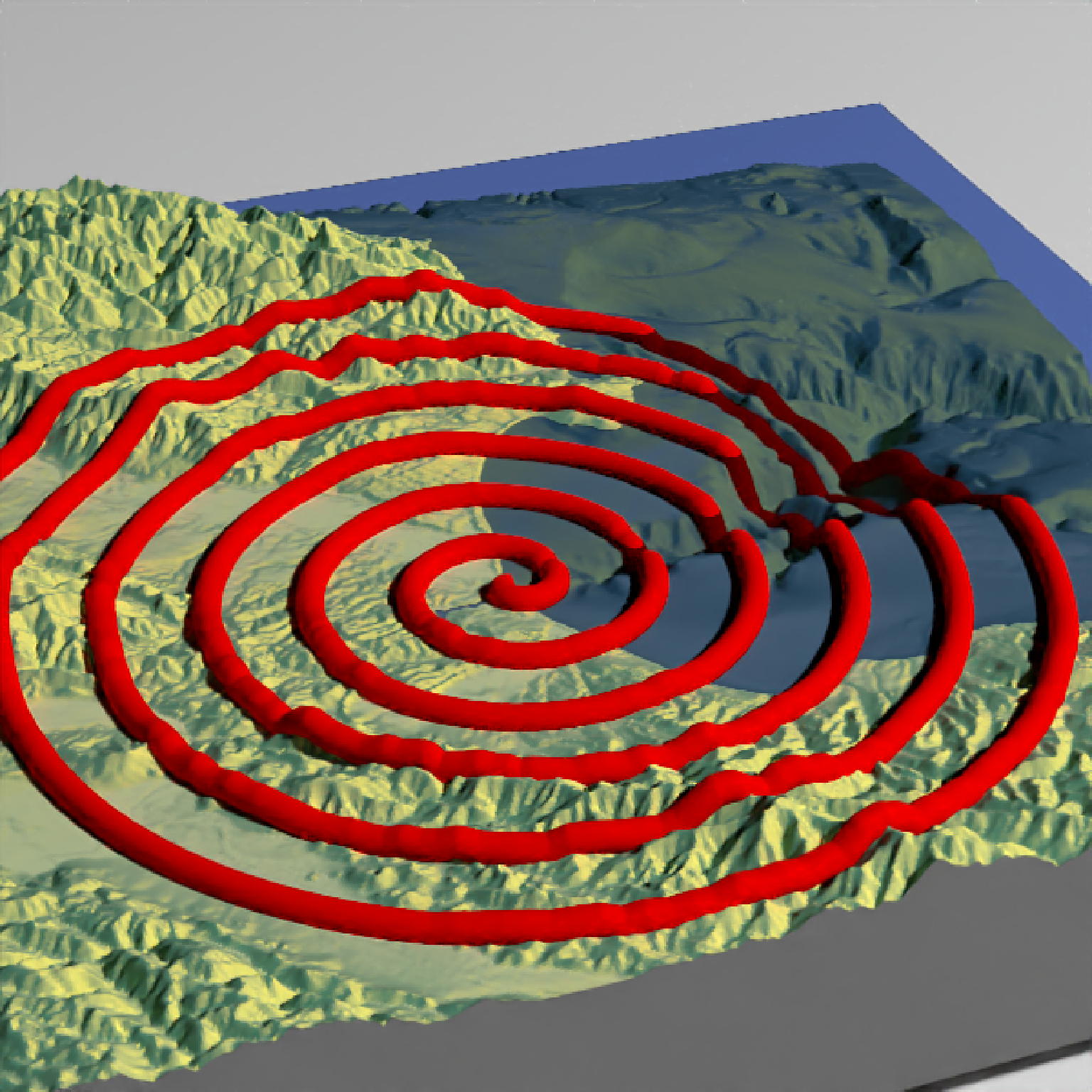
 if(run_documentation()) {
#And all of these work with `render_highquality()`. Here, I set `use_extruded_paths = TRUE`
#to get thick continuous paths.
render_highquality(line_radius=1, min_variance = 0,
use_extruded_paths = TRUE, samples = 16)
}
#> Warning: material set as vertex color but no texture or bump map passed--ignoring mesh3d material.
if(run_documentation()) {
#And all of these work with `render_highquality()`. Here, I set `use_extruded_paths = TRUE`
#to get thick continuous paths.
render_highquality(line_radius=1, min_variance = 0,
use_extruded_paths = TRUE, samples = 16)
}
#> Warning: material set as vertex color but no texture or bump map passed--ignoring mesh3d material.
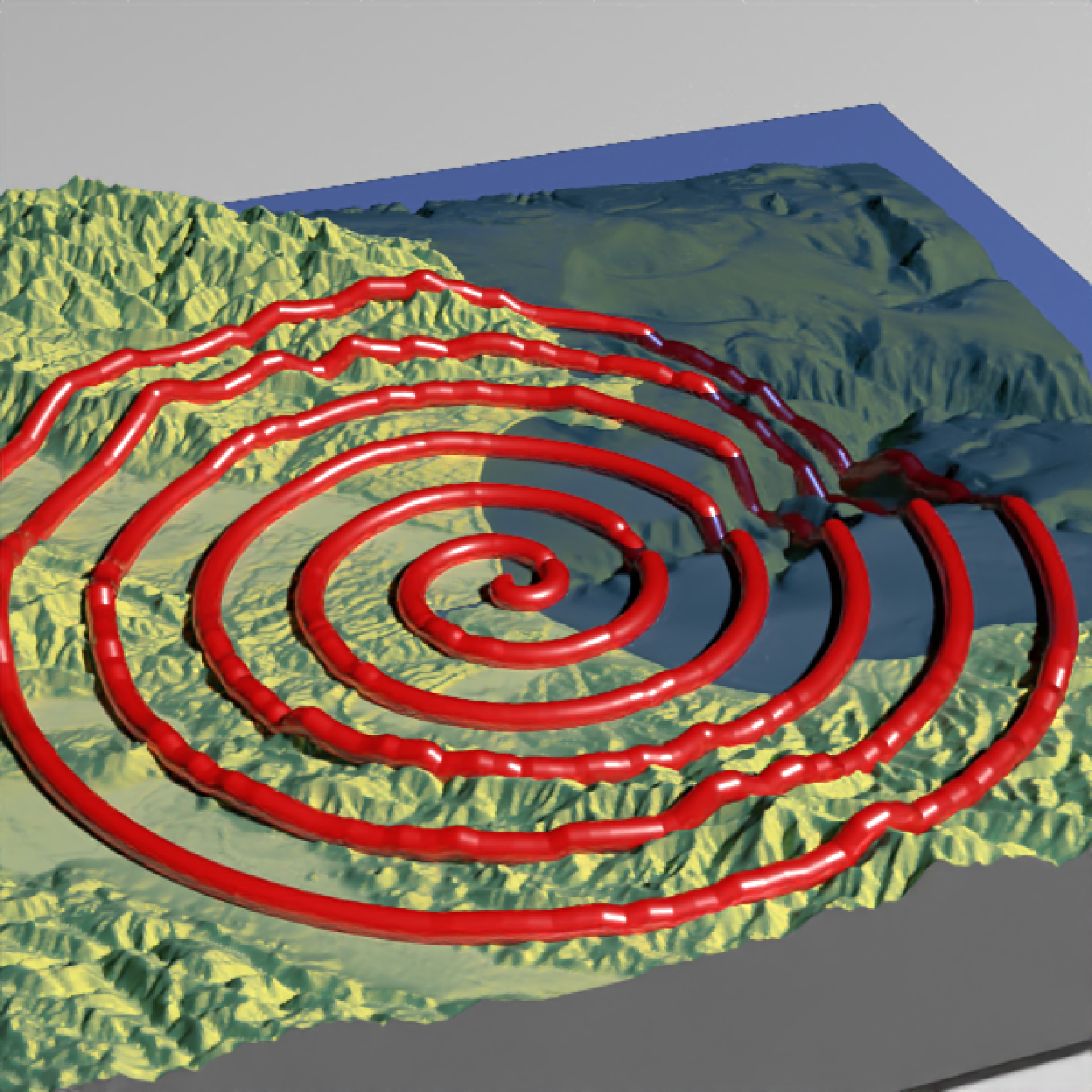
 if(run_documentation()) {
#We can also change the material of the objects by setting the `point_material` and
#`point_material_args` arguments in `render_highquality()`
render_highquality(line_radius=1, min_variance = 0, samples = 16,
path_material = rayrender::glossy, use_extruded_paths = TRUE,
path_material_args = list(gloss = 0.5, reflectance = 0.2))
}
#> Warning: material set as vertex color but no texture or bump map passed--ignoring mesh3d material.
if(run_documentation()) {
#We can also change the material of the objects by setting the `point_material` and
#`point_material_args` arguments in `render_highquality()`
render_highquality(line_radius=1, min_variance = 0, samples = 16,
path_material = rayrender::glossy, use_extruded_paths = TRUE,
path_material_args = list(gloss = 0.5, reflectance = 0.2))
}
#> Warning: material set as vertex color but no texture or bump map passed--ignoring mesh3d material.
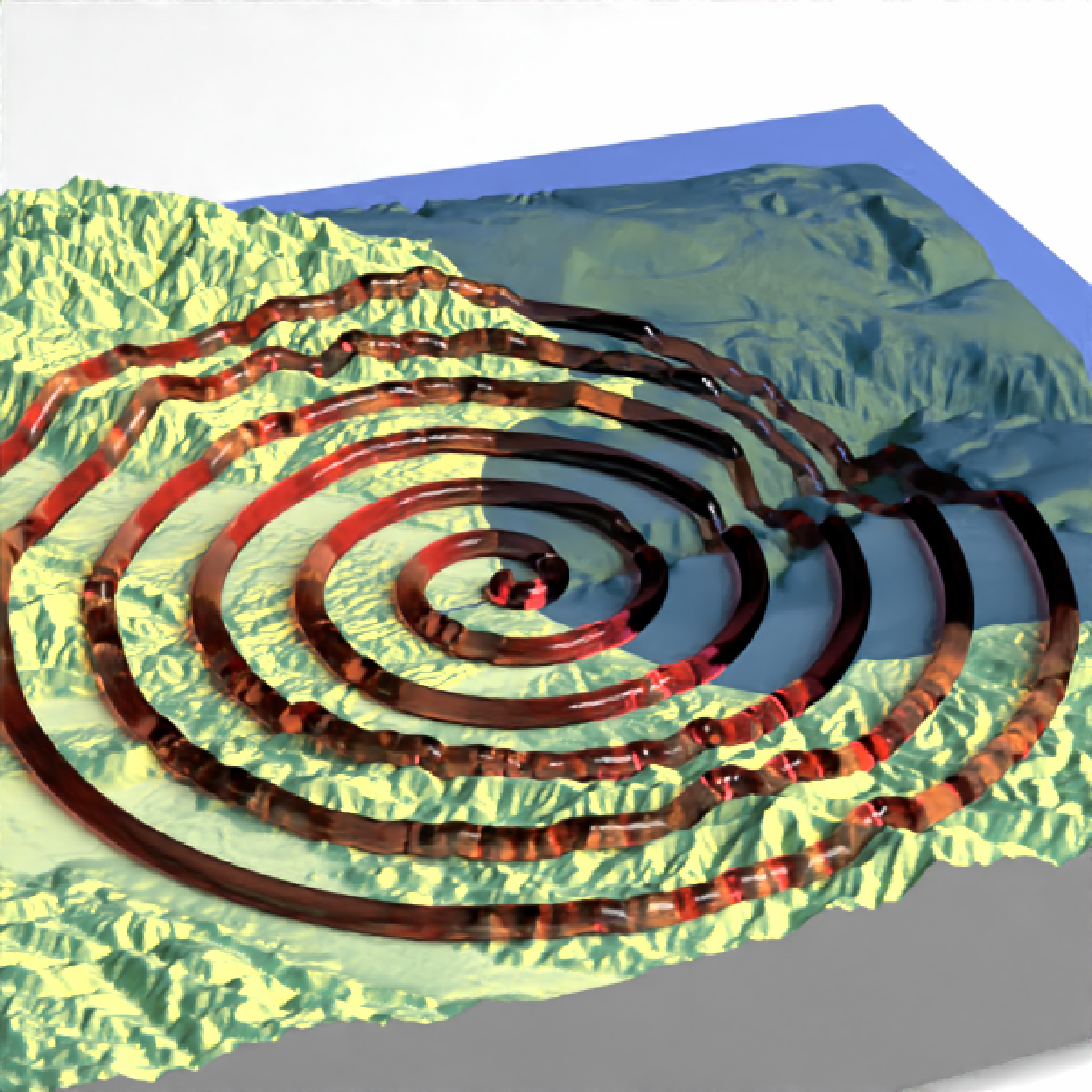
 if(run_documentation()) {
#For transmissive materials (like `dielectric`), we should specify that the path
#should be rendered with an extruded path. We'll use the `attenuation` argument in
#the `dielectric` function to specify a realistic glass color.
render_path(extent = attr(montereybay,"extent"), heightmap = montereybay, clear_previous = TRUE,
lat = unlist(circle_coords_lat), long = unlist(circle_coords_long),
zscale=50, color="white", offset=200, linewidth=5)
render_highquality(line_radius=1, min_variance = 0, samples = 16,
lightsize = 2000, lightintensity = 10,
path_material = rayrender::dielectric, use_extruded_paths = TRUE,
path_material_args = list(refraction = 1.5, attenuation = c(0.05,0.2,0.2)))
}
#> Warning: material set as vertex color but no texture or bump map passed--ignoring mesh3d material.
if(run_documentation()) {
#For transmissive materials (like `dielectric`), we should specify that the path
#should be rendered with an extruded path. We'll use the `attenuation` argument in
#the `dielectric` function to specify a realistic glass color.
render_path(extent = attr(montereybay,"extent"), heightmap = montereybay, clear_previous = TRUE,
lat = unlist(circle_coords_lat), long = unlist(circle_coords_long),
zscale=50, color="white", offset=200, linewidth=5)
render_highquality(line_radius=1, min_variance = 0, samples = 16,
lightsize = 2000, lightintensity = 10,
path_material = rayrender::dielectric, use_extruded_paths = TRUE,
path_material_args = list(refraction = 1.5, attenuation = c(0.05,0.2,0.2)))
}
#> Warning: material set as vertex color but no texture or bump map passed--ignoring mesh3d material.