Adds 3D OBJ model to the current scene, using latitude/longitude or coordinates in the reference system defined by the extent object. If no altitude is provided, the OBJ will be elevated a constant offset above the heightmap. If the OBJ goes off the edge, the OBJ will be filtered out.
If no latitudes or longitudes are passed in, the OBJ will be plotted in the coordinate system set by the user-specified
extent argument as-is. Use this alongside save_multipolygonz_to_obj() to plot 3D polygons imported from geospatial sources
in the proper location (but for ease of use, use render_multipolygonz() to plot this data directly).
render_obj(
filename,
extent = NULL,
lat = NULL,
long = NULL,
altitude = NULL,
xyz = NULL,
zscale = 1,
heightmap = NULL,
load_material = FALSE,
load_normals = TRUE,
color = "grey50",
offset = 0,
obj_zscale = FALSE,
swap_yz = NULL,
angle = c(0, 0, 0),
scale = c(1, 1, 1),
clear_previous = FALSE,
baseshape = "rectangle",
lit = FALSE,
light_altitude = c(45, 30),
light_direction = c(315, 135),
light_intensity = 0.3,
light_relative = FALSE,
rgl_tag = "",
...
)Arguments
- filename
Filename for the OBJ file.
- extent
Either an object representing the spatial extent of the scene (either from the
raster,terra,sf, orsppackages), a length-4 numeric vector specifyingc("xmin", "xmax","ymin","ymax"), or the spatial object (from the previously aforementioned packages) which will be automatically converted to an extent object.- lat
Vector of latitudes (or other coordinate in the same coordinate reference system as extent).
- long
Vector of longitudes (or other coordinate in the same coordinate reference system as extent).
- altitude
Default
NULL. Elevation of each point, in units of the elevation matrix (scaled byzscale). If leftNULL, this will be just the elevation value at ths surface, offset byoffset. If a single value, the OBJ will be rendered at that altitude.- xyz
Default
NULL, ignored. A 3 column numeric matrix, with each row specifying the x/y/z coordinates of the OBJ model(s). Overrides lat/long/altitude and ignores extent to plot the OBJ in raw rgl coordinates.- zscale
Default
1. The ratio between the x and y spacing (which are assumed to be equal) and the z axis in the original heightmap.- heightmap
Default
NULL. Automatically extracted from the rgl window–only use if auto-extraction of matrix extent isn't working. A two-dimensional matrix, where each entry in the matrix is the elevation at that point. All points are assumed to be evenly spaced.- load_material
Default
TRUE. Whether to load the accompanying MTL file to load materials for the 3D model.- load_normals
Default
TRUE. Whether to load normals for the 3D model.- color
Default
black. Color of the 3D model, ifload_material = FALSE.- offset
Default
5. Offset of the model from the surface, ifaltitude = NULL.- obj_zscale
Default
FALSE. Whether to scale the size of the OBJ by zscale to have it match the size of the map. If zscale is very big, this will make the model very small.- swap_yz
Default
NULL, defaults toFALSEunless plotting raw coordinates (no lat or long passed). Whether to swap and Y and Z axes. (Y axis is vertical in rayshader coordinates, but data is often provided with Z being vertical).- angle
Default
c(0,0,0). Angle of rotation around the x, y, and z axes. If this is a matrix or list, each row (or list entry) specifies the rotation of the nth model specified (number of rows/length of list must equal the length oflat/long).- scale
Default
c(1,1,1). Amount to scale the 3D model in the x, y, and z axes. If this is a matrix or list, each row (or list entry) specifies the scale of the nth model specified (number of rows/length of list must equal the length oflat/long).- clear_previous
Default
FALSE. IfTRUE, it will clear all existing points.- baseshape
Default
rectangle. Shape of the base. Options arec("rectangle","circle","hex").- lit
Default
TRUE. Whether to light the polygons.- light_altitude
Default
c(45, 60). Degree(s) from the horizon from which to light the polygons.- light_direction
Default
c(45, 60). Degree(s) from north from which to light the polygons.- light_intensity
Default
0.3. Intensity of the specular highlight on the polygons.- light_relative
Default
FALSE. Whether the light direction should be taken relative to the camera, or absolute.- rgl_tag
Default
"". Tag to add to the rgl scene id, will be prefixed by"obj"- ...
Additional arguments to pass to
rgl::triangles3d().
Examples
if(run_documentation()) {
#Render the 3D map
moss_landing_coord = c(36.806807, -121.793332)
montereybay |>
sphere_shade() |>
plot_3d(montereybay,zscale=50,water=TRUE,
shadowcolor="#40310a", background = "tan",
theta=210, phi=22, zoom=0.20, fov=55)
t = seq(0,2*pi,length.out=100)
circle_coords_lat = moss_landing_coord[1] + 0.3 * sin(t)
circle_coords_long = moss_landing_coord[2] + 0.3 * cos(t)
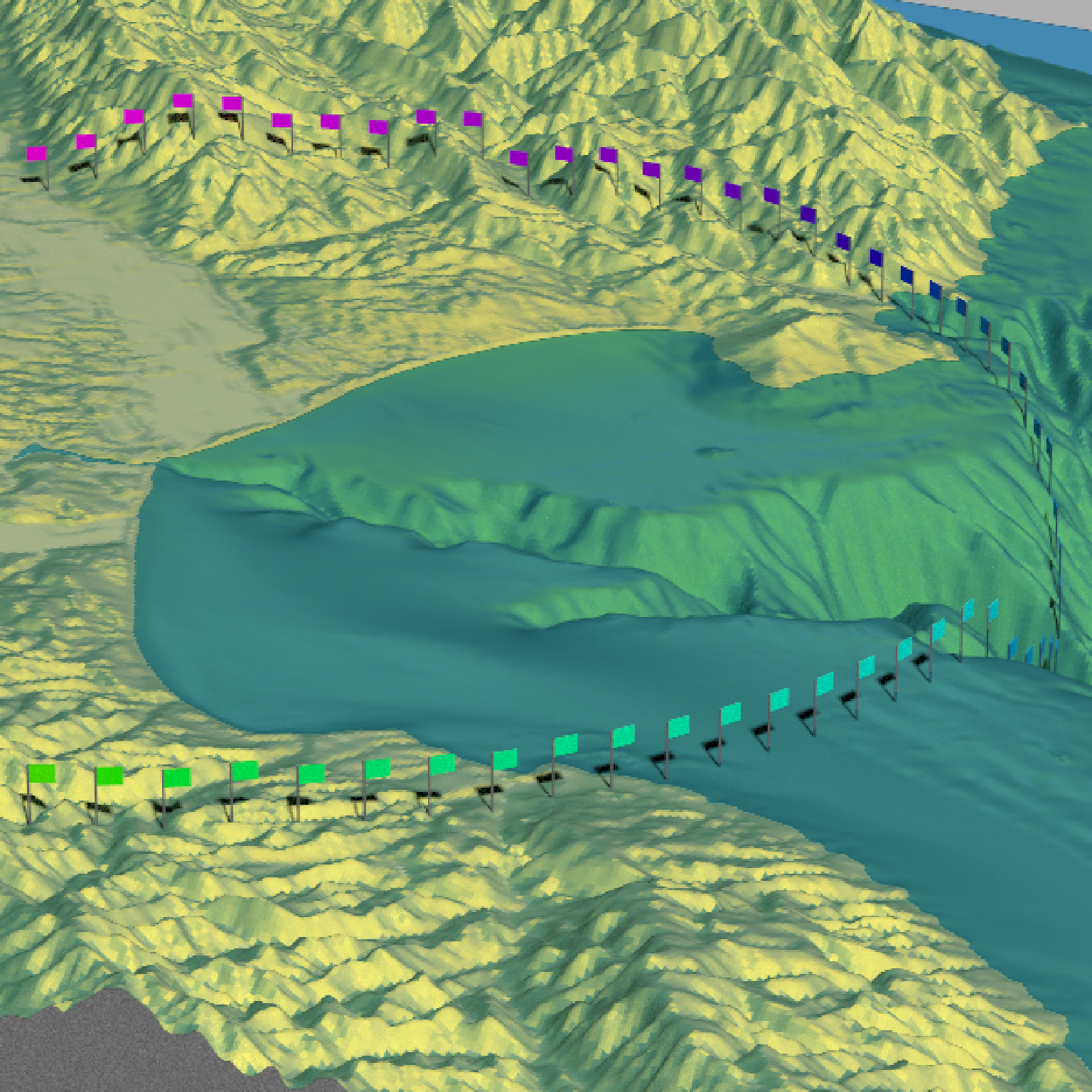
#Create a rainbow spectrum of flags
render_obj(flag_full_obj(), extent = attr(montereybay,"extent"), heightmap = montereybay,
lat = unlist(circle_coords_lat), long = unlist(circle_coords_long),
scale=c(2,2,2), angle=c(0,45,0),
zscale=50, color=rainbow(100), smooth = FALSE, clear_previous = TRUE)
render_snapshot()
}
 if(run_documentation()) {
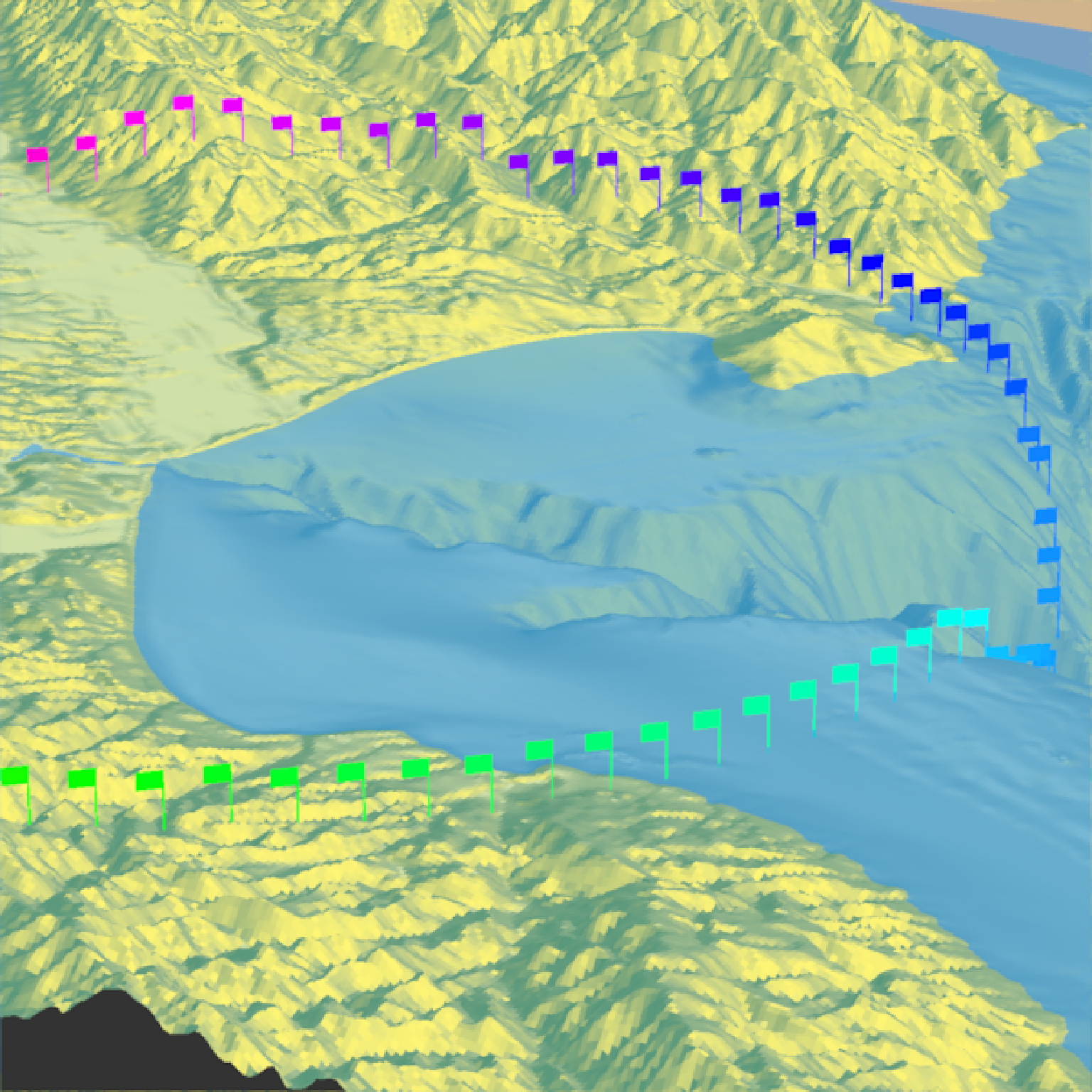
#Rotate the flag to follow the circle
render_obj(flag_full_obj(), extent = attr(montereybay,"extent"), heightmap = montereybay,
lat = unlist(circle_coords_lat), long = unlist(circle_coords_long),
scale=c(2,2,2),
angle=matrix(c(rep(0,100), seq(0,-360,length.out=101)[-1],rep(0,100)),ncol=3),
zscale=50, color=rainbow(100), smooth = FALSE, clear_previous = TRUE)
render_snapshot()
}
if(run_documentation()) {
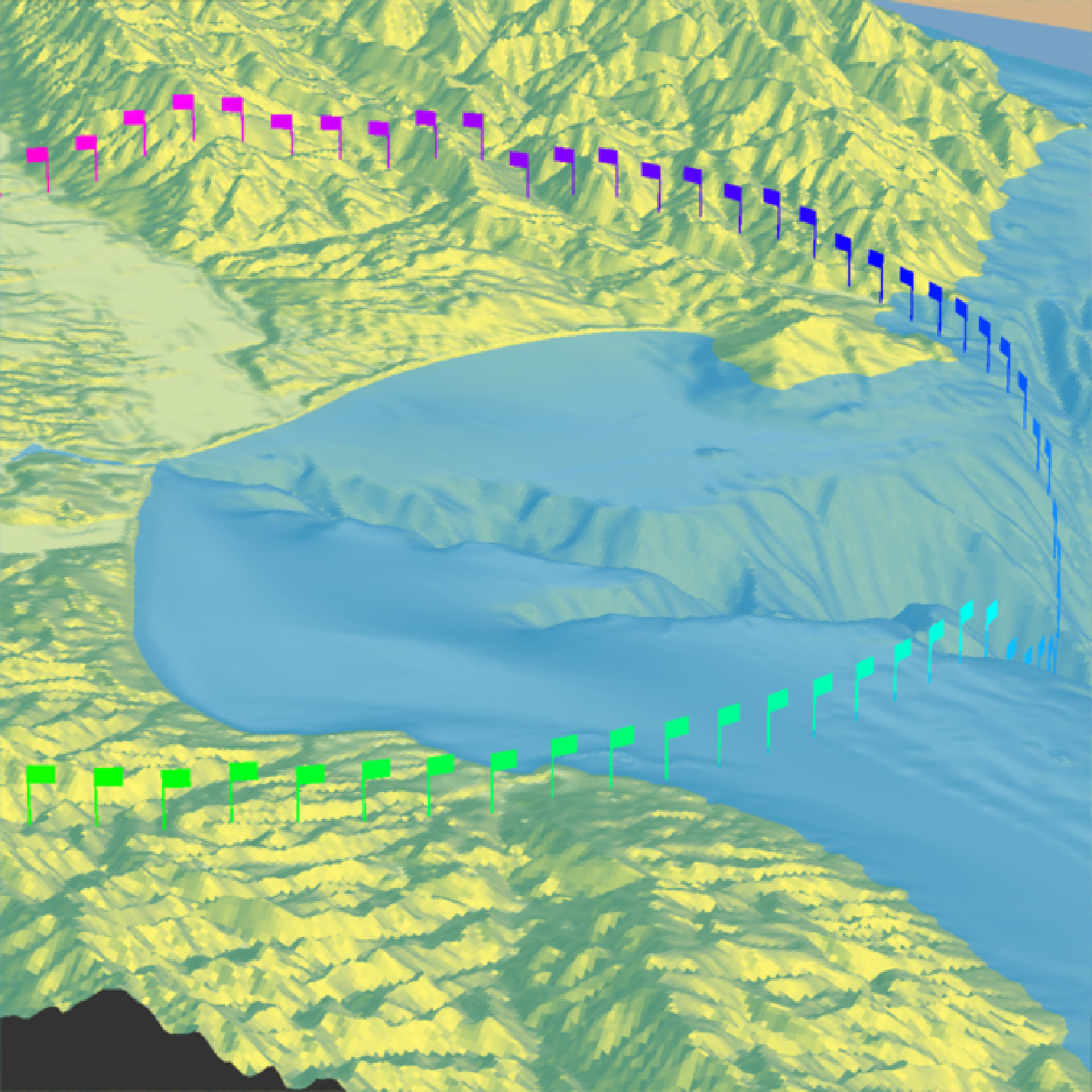
#Rotate the flag to follow the circle
render_obj(flag_full_obj(), extent = attr(montereybay,"extent"), heightmap = montereybay,
lat = unlist(circle_coords_lat), long = unlist(circle_coords_long),
scale=c(2,2,2),
angle=matrix(c(rep(0,100), seq(0,-360,length.out=101)[-1],rep(0,100)),ncol=3),
zscale=50, color=rainbow(100), smooth = FALSE, clear_previous = TRUE)
render_snapshot()
}
 if(run_documentation()) {
#Style the pole with a different color
render_obj(flag_pole_obj(), extent = attr(montereybay,"extent"), heightmap = montereybay,
lat = unlist(circle_coords_lat), long = unlist(circle_coords_long),
scale=c(2,2,2),
angle=matrix(c(rep(0,100), seq(0,-360,length.out=101)[-1],rep(0,100)),ncol=3),
zscale=50, color="grey20", smooth = FALSE, clear_previous = TRUE)
render_obj(flag_banner_obj(), extent = attr(montereybay,"extent"), heightmap = montereybay,
lat = unlist(circle_coords_lat), long = unlist(circle_coords_long),
scale=c(2,2,2),
angle=matrix(c(rep(0,100), seq(0,-360,length.out=101)[-1],rep(0,100)),ncol=3),
zscale=50, color=rainbow(100), smooth = FALSE)
#And all of these work with `render_highquality()`
render_highquality(samples = 16)
}
if(run_documentation()) {
#Style the pole with a different color
render_obj(flag_pole_obj(), extent = attr(montereybay,"extent"), heightmap = montereybay,
lat = unlist(circle_coords_lat), long = unlist(circle_coords_long),
scale=c(2,2,2),
angle=matrix(c(rep(0,100), seq(0,-360,length.out=101)[-1],rep(0,100)),ncol=3),
zscale=50, color="grey20", smooth = FALSE, clear_previous = TRUE)
render_obj(flag_banner_obj(), extent = attr(montereybay,"extent"), heightmap = montereybay,
lat = unlist(circle_coords_lat), long = unlist(circle_coords_long),
scale=c(2,2,2),
angle=matrix(c(rep(0,100), seq(0,-360,length.out=101)[-1],rep(0,100)),ncol=3),
zscale=50, color=rainbow(100), smooth = FALSE)
#And all of these work with `render_highquality()`
render_highquality(samples = 16)
}